

Autonomous artificially intelligent robotic vehicles and the future of the parking industry
Parking lots are assets that serve as entrances to city areas and businesses, from commercial stores and plazas to industrial and government buildings. There are two general classes of parking lots, secondary and primary. Secondary being those lots which serve as an access point to a primary business, such as a store or plaza, and primary being those lots which are not attached to any specific business and function solely as a standalone parking garage, such as in a downtown core. However all classes of parking lot serve the same customer, human beings, and the parking lots success depends on a model developed with the human customer in mind. People prefer clean parking lots that feel safe, one that is well maintained physically and structurally, looks appealing in general, and overall is a secure facility in which to leave their car and valuables. There are many ways that new technologies can aid in parking lots, not just to please their human customers, but to also reduce costs, increase revenues, lower liabilities, and improve overall efficiency. Autonomous vehicles, robotics, and artificial intelligence will play an important role in the future of the parking industry.
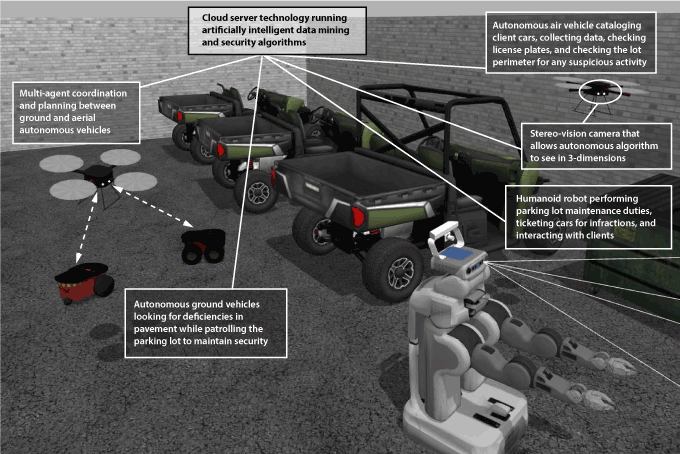
High-fidelity robotic simulation of a smart parking lot that uses autonomous air, ground, and humanoid vehicles to perform various duties and maintain parking lot safety. The Gazebo robotic simulator is used to develop, test, and validate autonomous algorithms to be deployed on real-world systems, such as the technologies shown in this diagram.
A well maintained, secure, and safe parking lot is very important to the success of the lot itself as well as the main business it serves. If the lot is classified as a primary parking lot, then it will keep customers coming back and not going to the competition. In the case of secondary parking lots, it is the first impression a customer gets of the business they have ventured to, and the lot is basically an extension of that business. In either case, a happy customer is more likely to spend money and keep coming back, which of course will generate more revenue for the business and parking lot.
Now, imagine a customer entering a parking lot with autonomous ground vehicles and robots patrolling the property using computer vision uplinked to a central cloud server, with maintenance robots cleaning and servicing the area and pavement, and autonomous aerial vehicles hovering above coordinating activities, navigating security blind spots and hard to reach areas, servicing structural and electrical components, interacting with customers using facial recognition and display screens, and providing an overall general feeling of security and safety.
While these robots are performing their duties they also will be collecting audio and visual data which can be uploaded to a central cloud server running sophisticated artificially intelligent statistical data mining algorithms that can be used to analyze the activity and patterns of customers to potentially increase profits while also filtering out and looking for suspicious activity to increase safety and security (these proprietary algorithms are a whole topic on their own). These technologies will make a safer environment for patrons and help to execute a proper asset management plan.
There are many roles that autonomous vehicles can play in the parking industry,
some examples being:
Autonomous Ground Vehicles (AGV)
- people can get out of their vehicle before entering the parking lot so that the vehicle can park itself and navigate the parking lot, almost like an autonomous valet service;
- AGV’s can patrol the parking lot to maintain security and surveillance, via a pre-arranged path or randomly, and protect the interests of property and vehicle owners (ground vehicles can also be equipped with special internal security, alarms, and tracking systems so that they cannot be stolen);
- AGV’s can also be used for cleaning, repairing, and maintenance and they can also be programmed to look for areas of deficiency and report back using special cameras mounted underneath them;
- AGV’s can use facial recognition and on-board display monitors to communicate and interact with customers, guide vehicles and patrons to where they need to go (such as if there are multiple entrances/exits), and even help them find their car by remembering their face;
- AGV’s can be equipped with seats or carriages to help patrons carry things to and from their car (perhaps for an additional fee);
Actually, a single autonomous ground vehicle could do all the things mentioned above.
Autonomous Air Vehicles (AAV)
- AAV’s, which are more agile and flexible, can patrol the perimeter from higher up and get into lots of different areas ground vehicles cannot access;
- AAV’s can be equipped with special cameras similar to ground vehicles in order to look for deficiencies in the building structure, heating and air vents, and electrical components;
- since AAV’s have a good view from high up and are very mobile they can be used to coordinate the activities of all the ground vehicles and provide a communication relay;
- AAV’s can be equipped with a screen and then aid drivers with arrows and messages to help them navigate the parking lot and find open spaces, help them find their car upon returning, and help them navigate the parking lot if there are multiple entrances/exits.
Autonomous Humanoid Robots provide a human-like presence and can perform tasks that require hand-like manipulators such as opening doors for customers, leaving parking tickets, and taking money payments.
These technologies really are not that expensive, and they do lower operating costs in the long-run, reduce liabilities, improve service and efficiency, and ultimately will allow the businesses that employ these technologies to stand out and pull ahead from their competition. The business model that must always be considered is to figure out how these technologies will increase revenues and reduce costs; not if, but how.
Algorithms
There are many different classes of algorithms used by autonomous vehicles to perform all their duties. There are localization algorithms that read in sensor data in order to figure out where the vehicle is within its environment. There are mapping algorithms that are used to map out the environment surrounding the vehicle so it can “know” and learn about the objects and obstacles around it and the available paths it could potentially take (through the use of sensors such as radar, sonar, and multiple cameras such as stereo-vision cameras so that the vehicle can literally see and have depth perception similar to how humans see).
There are path-planning algorithms that are used so the autonomous vehicle can navigate from point A to point B in a manner that is most efficient such as the shortest path, easiest path, or the path that uses the least amount of energy or effort. There are control algorithms that are used to precisely control the vehicles actuators (wheels, motors, propellers for air vehicles, etc) so that the vehicle can actually physically move to where it wants to go, such as by making the ground vehicles wheels turn at a constant rate through a feedback control system or so that an air vehicle will move in a nice fluid manner and not zigzag haphazardly all over the place.
There are decision-making algorithms for deciding what to do when there is more than one option available. On top of all these there are the algorithms that fall under the broader class of artificially intelligent algorithms that solve a specific task or problem.
The artificially intelligent algorithms that run on the autonomous vehicles and on the central cloud server that the vehicles are connected to can do numerous things and are considered a completely separate topic than the autonomous vehicles previously described:
- the audio and visual data that the vehicles upload to the server can be processed to extract the demographic information of the customers and shoppers which can be plotted against time and analyzed to provide valuable insight to the businesses that own the parking lot;
- the data can be analyzed to look for suspicious activity by first filtering out successive video images that contain a lot of activity and then analyzing audio and facial expressions to look for certain attributes like panic, aggression, etc.;
- the central server can dispatch autonomous air and ground vehicles to further investigate suspicious activity and collect more information and get different viewpoints, while also providing a deterrent because if potential criminals are being followed and recorded by an autonomous air vehicle then they will be less likely to follow through with their crime;
- the liability protection and audio-video data provides evidence for follow-up if such a situation arises while also demonstrating that the parking lot management is concerned and trying to make the parking lot safe and secure, and that management negligence is not possible since they are employing a “proven” artificially intelligent monitoring system coupled with autonomous vehicles;
- the other liability protection is that these artificially intelligent systems will actually reduce accidents and unwanted events (events which can be described and programmed), which is necessary in an ever increasing litigious society; and
- the central artificially intelligent monitoring system can look for potential hazards in the parking lot and combine information collected from all the autonomous vehicles together to greatly increase its accuracy and dependability.
These algorithms and technologies do have a direct effect on a parking lots’ revenues as they lower costs and liabilities, increase safety and customer confidence, and ultimately will bring in more business and customers compared to competitors who are running a rudimentary lot. These concepts are similar to the concepts discussed in previous editions of The Parker having to do with proper and planned asset management and the benefits of scheduled maintenance compared to waiting until it is too late.
Another topic that is important to consider is the verification and validation of an autonomous vehicles hardware and artificially intelligent software systems, which are achieved through very detailed and comprehensive simulations using robotic simulators before the real-world systems are built, and for testing out new algorithms on already existing real-world vehicles. Simulation technologies play a huge part in all real-world autonomous robotic vehicles that currently exist, and none of today’s technologies would exist without the simulators and their associated technologies, such as how they have been used by NASA for every space mission to date including the Mars Rover. There is a lot of academic research into the topic of robotic simulation technology and constantly trying to make it better and more realistic, which in turn makes the real-world technologies better. In its most general sense, a robot is any kind of mechanical agent controlled by a computer program, such as autonomous air and ground vehicles.
The robotic simulators allow for robotic hardware to be simulated on a computer and provides an easy, safe, and cost-effective platform for developing and verifying real-world robotic systems without having
to depend on the existence of the real-world vehicle. Robotic simulators make it possible to test out hardware that does not currently exist or that is not attainable due to cost. In addition to testing out various types of hardware, robotic simulators also give the ability to test and develop autonomous and artificially intelligent algorithms using the simulated hardware in situations that would be too time-consuming or too dangerous to attempt in the real-world. The state of the current robotic simulation research is well covered and discussed in Ref. [1-4].
In addition to the autonomous vehicle technology and the artificially intelligent algorithms there is the research areas of the materials and physical components used by the vehicles and how they are engineered. In order to reduce costs and make efficient use of resources an analysis should be performed as to the desired function of the vehicles, the environment that they are going to be operating in, and the accuracy required by the vehicles in order to properly determine what components and vehicles to purchase for the specific scenarios and duties required.
For example, there is no point spending $10,000 on an autonomous vehicles hardware if the $1,000 vehicle can handle the job, especially when this is scaled to a large degree of vehicles. Most of the costs associated with these “futuristic” technologies has to do with the development of the autonomous and artificially intelligent algorithms used by the vehicles.
There has been very little development of autonomous and artificially intelligent algorithms specifically for the parking industry, but early adopters and investors into these technologies will reap huge profits in the future. For example, today it is easily possible to purchase autonomous vehicles for $500 – $5,000 a piece (both ground and aerial vehicles), and they will last a long time, however they are delivered with “empty” computers, so to speak, and they will not have the algorithms required for application in the parking industry.
But what if they came preloaded with all the necessary algorithms and artificially intelligent systems demanded by the parking industry? If these systems are properly developed then they can essentially be thought of as a one-time cost that can be used over and over again (perhaps with some periodic maintenance), and sold over and over again, but this would require an initial investment to develop the parking industry specific algorithms discussed previously in this article. This is where early technological adopters and investors reap huge rewards by investing and creating startup companies to design and develop the autonomous and artificially intelligent technologies and then sell their developed technologies all over the world to the parking industry.
Parking lots and the parking industry are cemented in tomorrow’s future. Even with all the money pumped into public transit the number of cars sold each year in Canada and North America increases year over year, as do the number of cars actively on the road, as discussed in Ref. [5-6]. For example, comparing 2007 to 1994 the number of people who used public transit to get to work was virtually the same, 15% and 14% respectively, despite the huge advancements of public transit availability5. Also looking at Ref. [6] reveals that over the past 5 years, for example, the number of cars sold each year has steadily increased. These facts have very important implications and give interesting insight because it demonstrates that people love the convenience of cars and using their own private and personal car on a day to day basis, and of course people need places to park their cars, which is great for the parking industry. The other factor to consider is that cars have become a lot more affordable and reliable, and even a second hand car can be bought inexpensively.
With the onset of autonomous vehicles and self-driving cars the number of cars on the road will still continue to increase each and every year. The introduction of self-driving cars will actually increase the demand for parking lots because more people will be using cars, especially when they no longer have to worry about driving, and so every person will most likely have their own car, or multiple cars, and will need a place to park it. Car-sharing, in which multiple people share a public-like car on a pay-per-use basis will not really affect the parking industry because people generally use a car to stop at different locations so they will still need to use parking lots. Also people do not always like sharing private and personal spaces such as a car with random people they do not know, so most people will still need their own car. Car-sharing is just another form of public transit and will not stop people from wanting and using their own car, similar to how public transit has not seemed to affect car sales and car use.
Since cities are becoming forever denser, parking lot assets will continue to increase in value and importance. Technology has merged with every economic sector and one day soon robotics and artificial intelligence will be an important component of the every parking lot, as is already evident with automatic pay and enter systems, automatic surveillance systems, and automatic lighting systems.
Early startup companies that create and deploy robotic and artificially intelligent autonomous systems will pioneer the technologies much like the first parking lots that pioneered automatic pay and enter systems. All the autonomous technologies and artificially intelligent algorithms discussed throughout this article are easily doable right now, today, and really are not that futuristic since they exist in other industries. The way to think about these technologies is that someone has to be the first do a specific application of it, and until someone does it will be perceived as “futuristic”. ν
Note to the reader from this articles author Shawn Walker: As I previously discussed in this article, these technologies and their application to the parking industry, and more largely to the property management industry at large, are currently in their infancy. I believe that these technologies are going to soon come one way or another to the parking industry because everything discussed in this article can be done already and I have prototypes currently working in my lab. I also believe that early investors into these technologies have huge opportunities to be the one to bring these technologies to the worldwide parking industry market and reap the return on investment.
For more information about this, contact smwalker@yorku.ca
References
[1] S. M. Walker and J. Shan, “High-Fidelity General-Purpose Robotic Simulation Framework for Artificially Intelligent Space Exploration Vehicles” in AIAA Science and Technology (SciTech2016) Forum. San Diego, California, USA, January 4-8 2016.
[2] S. M. Walker, J. Shan, and R. Allison, “Hard Real-Time General-Purpose Robotic Simulations of Autonomous Air Vehicles” in AIAA Science and Technology (SciTech2016) Forum. San Diego, California, USA, January 4-8 2016.
[3] S. M.Walker and J. Shan, “Using the DIMMACSS-PSG intelligent robotic middleware to control real-world and simulated multi-agent systems,” in AIAA Science and Technology (SciTech2015) Forum. Kissimmee, Florida, USA, January 5-9 2015.
[4] S. M.Walker, J. Shan, and L. Liu, “DIMMACSS-STAGE: A distributed intelligence model for a multi-agent control system using simulink and the stage robotic simulator,” in AIAA Science and Technology (SciTech2014) Forum. National Harbor, Maryland, USA, January 13-17 2014.
[5] Munro, A. “Public transit in Canada, 2007”, Statistics Canada, Environment Accounts and Statistics Division. Accessed February 27, 2016. http://www.statcan.gc.ca/pub/16-002-x/2010002/article/11283-eng.htm.
[6] Government of Canada. “New motor vehicle sales”, Statistics Canada. Accessed February 27, 2016. http://www.statcan.gc.ca/tables-tableaux/sum-som/l01/cst01/trade12-eng.htm.

{kind=link}